


Available topics for theses
We have many thesis proposals for you to challenge yourself with interesting and cutting edge topics. Please check a list of open topics below. You are also welcome to come and discuss your own thesis proposal.
Age of information in modern random access for IoT systems
The internet of Things (IoT) is attracting an increasing attention from both industry and academia, and will be a core component of the next generation 6G systems. In an IoT network, a potentially massive number of low-cost, low-complexity devices generate traffic to be reported to a common receiver monitoring the situation. Relevant examples include asset tracking, industrial and environmental monitoring, smart cities, as well as cyber-physical systems.
In this context, medium access protocols are paramount to grant an efficient sharing of the wireless channel among a massive number of uncoordinated terminals. Modern random access schemes, combining the principles of ALOHA with advanced signal processing techniques, have emerged as a promising solution, and have proven capable of achieving excellent performance in terms of throughput and reliability. On the other hand, for many relevant IoT applications, information may only valuable if up-to-date, i.e. if received within a certain amount of time from the moment it was generated.
This aspect, often measured in terms of age of information, is fundamental to the design of efficient systems, as transmission of old data packets might not only be useless but even harmful for the network, inducing additional congestion on the channel. Understanding how modern random access schemes perform and can be optimized from this standpoint is a key yet still open question, with profound implications on system design.
This thesis is organized in the scope of a collaboration with DLR, the German aerospace institute. Please find additional information in this PDF document.

Security and privacy enabled by Reconfigurable Intelligent Surfaces
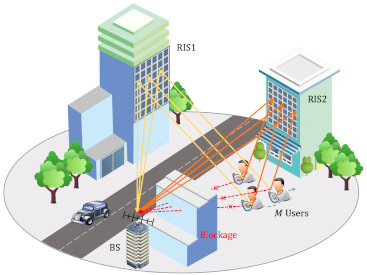
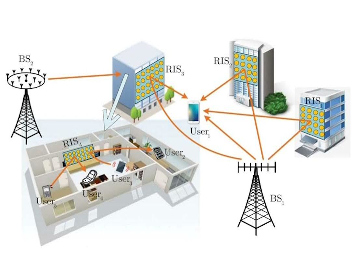
Reconfigurable intelligent surfaces (RISs) offer a practical and flexible instrument for managing and steering radio propagation, focusing signals of interest on the device that should receive them. As such, RISs are typically exploited for signal-to-noise-ratio optimization or coverage extension in the presence of obstacles to radio propagation, such as in urban canyons. Yet, RISs find many additional interesting, including security. In this thesis, the student will explore the concept of channel crafting for privacy or authentication purposes, in urban scenarios where multiple RISs are installed.
Smart channel hopping and Adaptive Modulation and Coding for Volleyball Referee Conference Call Reliability
This project is developed together with It-Garage and Lega Pallavolo Serie A and will be co-supervised by profs. Casari and Patrignani. The goal of this project is to develop an ML-enhanced application that will perform smart hopping between different WiFi communication channels, in order to robustify a conference call application by making its traffic resilient to interference. The work should also account for different voice coder as well as adaptive modulation and coding (AMC) configurations, in order to provide the best resilience against scenarios where interference is unavoidable. This project will be evaluated on the current WiFi infrastructure used by the Superlega referees. The thesis is preferably for Master students. If you are a talented and motivated BS student, please contact the supervisors for more information.


(Images: SeiMedia srl, ECN)
Private 5G Network for Intercommunication of Volleball Superlega Referees
This project is developed together with It-Garage and Lega Pallavolo Serie A, and will be co-supervised by profs. Casari and Patrignani. The candidate will study the feasibility of setting up a private 5G cell to allow the referees of a Volleyball Superlega match to communicate with one another. This project will consist of deploying an existing conference call application on an experimental private 5G cell in order to test its efficiency. The goal is also to study different solutions similar to a private 5G cell, in order to show their effectiveness with respect to their cost. Finally, once developed, the candidate will test the system in a real Superlega match (at the IT Quotidiano arena), assuming the effectiveness of the solution is reasonable. The thesis is preferably for Master students. If you are a talented and motivated BS student, please contact the supervisors for more information.

(Images: SeiMedia srl, ECN)
Cyberphysical systems and 4G/5G networks: demonstrating the effect of excessive delays
The candidate will consider a scenario where a person wearing a VR headset interacts with the physical environment. The objective of the thesis is to create a demo where the headset receives a video feed of a moving object (e.g., a pendulum, or a remotely controlled car), and the user is asked to act on the object (a.g., grab the end of the pendulum, or control the car). The demo should show that delaying the video feed compatibly with 4G network delays would make the cyberphysical interaction much more difficult and cumbersome.
For the Bachelor version, the effects of network delays will be simulated. For the Master’s version, these effects will be emulated through software defined radio platforms under different amounts of background traffic.

(Image: Wikipedia)
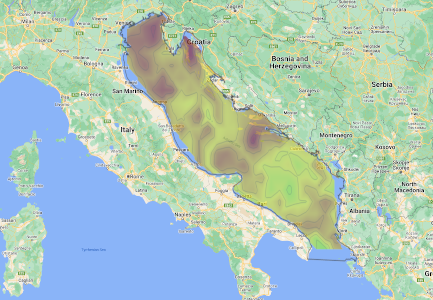
Modeling of underwater radiated noise using AIS data
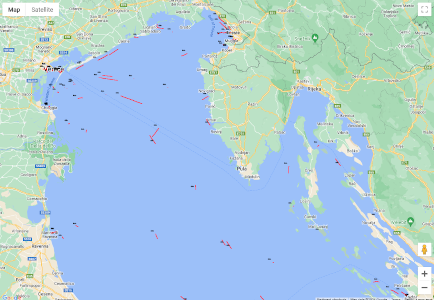
Most ships are required to mount an Automatic Identification System (AIS) to make themselves known and monitored by authorities. Given their location, speed, and the type of ship, this makes it possible to predict how much noise the ship’s activity is generating and propagating under water.
In this thesis, you will collaborate with the MANTA team in the preparation of a tool that automatically retrieves AIS data from the Internet, and runs an underwater acoustic propagation model to predict propagate noise. The thesis can take a different twist depending on the interests of the student, e.g., you could:
- integrate the system with different types of world maps and multimodal information (e.g., weather)
- integrate multiple AIS sources that publish AIS data to improve the data retrieval rate
- improve the responsiveness or resolution of the underwater noise propagation tool
- create a service that can be hosted on a web server and publicly accessed
- use historical shipping data to create reproducible simulation results or a combination of these, including other activities that the student may find interesting.
The topic can be tuned towards a Bachelor’s as well as Masters’ degree thesis.
Comparing the capabilities of underwater noise propagation simulators
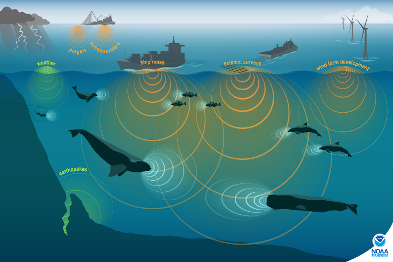
Human activities below the water surface will inevitably increase and include offshore energy generation, fish farming, resource extraction, prospection, and mining. All of these activities generate noise, and directly affect marine life.
This thesis aims at comparing different approaches that bring together a number of tools (mainly, Bellhop) and datasets (mainly, WOA, GEBCO, and Deck-41) and model noise propagation over a given location.
Through this thesis, you will understand how noise propagates under water in a very practical fashion, and will be able to contribute to spreading the knowledge about this phenomenon. Note: knowing the physics of the process is not a requirement.
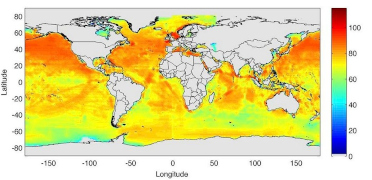
(Images courtesy of WYNC studios, NOAA, Duke, HLS Research)
Ship tracking and dark ship detection using underwater drifters
Ocean navigation supports countless activities, from scientific expeditions, to global shipping of goods, fishing, recreation, sub-bottom prospection, etc. Most ships are required to mount an Automatic Identification System (AIS) that tracks their identity, position and speed over time. Some ships that wish to not be tracked (e.g., because they are performing some illegal activity) may turn off their AIS and become invisible to aby control center by all means.
Now, all shipping activities generate noise, mainly from the propellers of a ship, but also from machinery onboard the ship (cranes, processing systems, etc.). This underwater radiated noise disturbs marine life in several ways. At the same time, the radiated noise footprint can enable dark ship detection when a ship deactivates their AIS system.
In this thesis, you will explore how to exploit underwater radiated noise to identify the location of a dark ship. You will use tools that automatically compute how noise propagates under water, and explore how to detect, localize and track vessels that should not be present according to AIS data.
The topic can be tuned towards a Bachelor’s as well as Masters’ degree thesis.
Integrating communications in a fully immersive driving simulator
The thesis is in cooperation with the Department of Industrial Engineering (DII) (Prof. Biral and Prof. Bertolazzi). The Department of Industrial Engineering has developed a fully immersive driving simulator which enables the study and the development of autonomous driving systems, vehicle dynamics model, user interfaces, and much more. In particular, the simulator could be use for the study of cooperative driving solutions, but this requires to integrate existing network simulators into the loop. The thesis will study how to integrate state of the art vehicular network simulation frameworks like Plexe/Veins/OMNeT++ into the driving simulator and evaluating its impact on simple cooperative driving solutions. We are searching for highly motivated students which have a strong background in programming, good knowledge of basic networking systems, and that are willing to learn new concepts. Prof. Biral and Bertolazzi (DII) will advise the students for what concerns the driving simulator and the models, whereas Prof. Segata and Casari (DISI) will guide the students with respect to the network simulation part. The thesis is coupled with an internship at the department.

Design of a low-cost, low-power underwater acoustic recorder
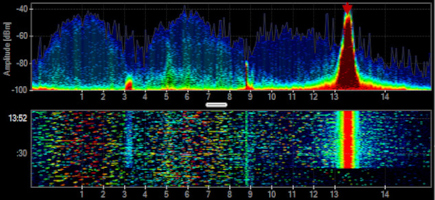
When performing underwater remote sensing and communication experiments using acoustic signals, it is helpful to have a passive recorder that tracks the transmitted signals and detects any sound changes in the surroundings.
However, commercial recorders are often extremely specific, and only work within a very specific acoustic band.
In this thesis, the student will build a submarine acoustic recorder by choosing and assembling all the components (mainly, broadband hydrophone, amplifier, control board like RaspberryPi Zero or similar, configurable analog filter, sound card, and watertight case). Particular attention will be paid to energy consumption and to ensuring at least 12 hours of continuous recording without recharging the batteries. The system will have to enable the choice of different sampling frequencies, and a different number of bits per sample, and will be tested in the field to evaluate its effectiveness.
Bachelor and Master versions of this thesis differ in the degree of advancement and testing of the prototype recorder.
Also available in coordination with a research project or project course.
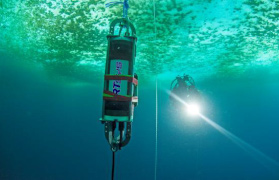
(Image courtesy of RTSys)
Modeling and optimizing autonomous vehicles in RailEvo stations
This thesis is done in cooperation with the RailEvo company and it aims at:
- developing a simulation framework capable of modeling RailEvo stations;
- implementing a strategy for autonomously coordinating RailEvo vehicles inside stations;
- showing the impact of different strategies.
With respect to the first goal, the student will exploit the microscopic mobility simulator SUMO and customize it for the purposes of the study, enabling the possibility of simulating autonomous movements inside a station, as well as the loading and unloading of passengers. The student will then develop and study different strategies for the autonomous coordination of vehicles inside a station, showing benefits and drawbacks of the proposed solutions.
Traffic flow estimation of the RailEvo transportation system
This thesis is done in cooperation with the RailEvo company and it aims at:
- developing a simulation framework capable of modeling classic railway transportation systems and RailEvo;
- evaluating the potential gain in the flow of passengers using the simulation framework.
With respect to the first goal, the student will exploit the microscopic mobility simulator SUMO and customize it for the purposes of the study. In the second phase, the student will model passenger demands and measure the passengers flow rate, aiming at measuring the gain obtained using the RailEvo system. In addition, the study will also consider power consumption metrics to show not only the benefits in terms of transportation but also in reducing energy consumption.
Experiments with Model Cooperative Driving Cars
Rather than a single thesis, this is a group of multiple theses in cooperation with the Free University of Bolzano-Bozen concerned with the development of cooperative driving solutions on a small-scale platform composed of model automated driving cars (see DonkeyCar).
A thesis in this topic can include
- development of a framework to program the behavior of the cars and to collect data
- the implementation of basic driving algorithms (such as classic Adaptive Cruise Control)
- the implementation of more advanced cooperative driving algorithms (Cooperative Adaptive Cruise Control)
- the implementation of cooperative manuevers (e.g., cooperative lane change)
- Multi-access Edge Computing (MEC) solutions for cooperative driving
- data collection, cleaning, and fusion solutions
Impact of Interference by Reconfigurable Intelligent Surfaces on Inter-Vehicle Communication
Reconfigurable Intelligent Surfaces (RISs) are devices capable of reflecting wireless signals towards a desired, reconfigurable direction. They have been proposed to solve the signal blockage problem typical of mmWave and THz communication technologies. The principal envisioned use case is coverage extension of mmWave cellular base stations, enabling to reach users “hidden” behind objects such as buildings. Recently, they have also been proposed for vehicle-to-vehicle communications to enhance cooperative driving in urban scenarios or enable data transfer for vehicular edge computing. While the benefits seems clear, the community did not investigate potential drawbacks yet. With respect to cellular networks, each mobile operator might deploy its own surface, and RISs belonging to one operator might cause unwanted reflections that interfere with users of another one. With respect to vehicular networks, local communication signals on a specific road might be reflected towards another one, generating additional interference on the channel. The aim of this thesis is to quantify to which extent RISs generate additional interference and potentially finding a solution to the problem. Such analyses will be carried on through discrete event simulation frameworks such as Plexe, Veins, and OMNeT++. The thesis will be in cooperation with the TKN group of the Technical University of Berlin. You can find additional information here.
Reconfigurable Intelligent Surfaces for Cooperative Driving
This thesis studies the usage of Reconfigurable Intelligent Surfaces for supporting around-the-corner communication in mmWave networks. The final aim is enabling high-bandwidth vehicle-to-vehicle communication for collective perception and/or vehicular edge computing. The thesis deals with the performance evaluation of reflected mmWave links, as well as other higher-level aspects such as resource scheduling.
V2X-based Collision Avoidance System for MTB Trail Riding
The alps see a surge of trail parks being built. These trails include frequent turns and jumps which are often ridden at high speeds. If bikes block the trail due to a stop or accident, limited line-of-sight can lead to collisions and severe accidents when following bikes crash into the blocking bike. With this work, we want to investigate if V2X communication can provide blocked trail warnings to approaching bikes so that riders can reduce their speed and avoid accidents. For this, a number of technologies that have been developed for collision warning in automotive and street-based scenarios need to be investigated, adapted, and tested for suitability. This includes the V2X communication module and antenna, that need to be adjusted to fit into a bike. Communication ranges and reliability have to be tested in realistic outdoor settings. Second, it needs to be reliably determined whether a bike actually blocks a trail or whether the rider just stopped next to it. For this purpose, GPS accuracy alone is insufficient and might have to coupled with crash detection using motion sensors or camera-based image recognition to detect whether a bike blocks a trail or not. Last but not least, a suitable user interface has to be developed and tested that allows to warn approaching drivers in a reliable and intuitive way which works even during trail rides. The envisioned thesis can address one or multiple of these challenges, multiple students could also collaborate on the topic. The project is collaboration between Ulm University and University of Trento. After prototype development, field tests in the Alps in South Tyrolia / Alto Adige are planned.
Cooperative driving maneuvers
In this thesis you will develop and study mechanisms to perform cooperative maneuvers between vehicles, e.g., cooperative lane changes. The thesis includes a modeling part, where the problem is mathematically formalized, and an implementative part, where the solution will be implemented and tested within the Plexe simulation framework.